工业机器人操纵器 3-7 轴向的

3-7 轴工业机器人操纵器ARKODIM,用于装卸工件, 零件及其杂货运输.
工业机器人机械手用于服务铣削, 数控车床, 铸造设备, 冲压和锻压机, 加工中心, 等等. 维护中是指工件的装卸, 零件及其保养. 也, 当机器执行其基本功能时, 机器人可以产生辅助操作: 标记, 修整, 吹, 等等.
描述:
机器人ARKODIM是 3-7 轴工业机器人机械手悬臂型线性 建筑.
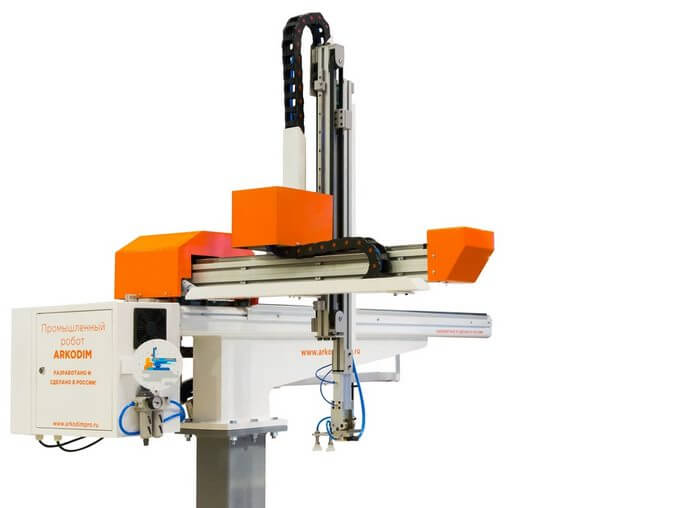
工业机器人ARKODIM 用于服务 铣削, 数控车床, 铸造设备, 冲压和锻压机, 加工中心 , 等等. 正在维修 机床 指工件的装卸, 零件及其保养. 也, 当机器执行其基本功能时, 机器人可以产生辅助操作: 标记, 修整, 吹, 等等. 工业机器人ARKODIM也可能是 机器人-电焊工, 机器人画家, 机器人码垛机, 等等.
工业机器人ARKODIM是根据客户要求单独制造的. 工业机器人可以具有不同的尺寸, 具有不同的精度等级 (机器人ARKODIM的精度 0.1 毫米), 不同的速度, 不同的能力,并有 3, 4, 5, 6 要么 7 运动轴.
好处:
–机器人设计ARKODIM是长期运行,无需频繁维护
—— 它们不需要复杂的维护,并且易于配置以执行不同的操作
- 控制 机器人 通过特殊程序,
—— 工业机器人ARKODIM可以将其自身的管理系统与CNC机床的控制系统完全集成在一起使用. 这样可以最大程度地减少机器人与机器之间的信息交换, 大大减少了生产周期的总持续时间.
应用:
在制造业中使用机器人技术导致:
—— 机器利用率高;
—— 稳定性 周期;
—— 最小废品率;
—— 生产中没有事故;
—— 例外 “人的因素”;
—— 保存在框架上;
—— 直接的经济利益.
注意: 例如技术描述, 工业机器人ARKODIM.


